




computer vision AI / Shutterstock. One of the most powerful and compelling types of AI is computer vision which you’ve almost surely experie...
 |
| computer vision AI / Shutterstock. |
Computer vision is the field of computer science that focuses on replicating parts of the complexity of the human visual system and enabling computers to identify and process objects in images and videos in the same way that humans do. Until recently, computer vision only worked in a limited capacity.
Thanks to advances in artificial intelligence and innovations in deep learning and neural networks, the field has been able to take great leaps in recent years and has been able to surpass humans in some tasks related to detecting and labeling objects.
 |
| YOLO Multi-Object Detection And Classification System |
Early experiments in computer vision started in the 1950s and it was first put to use commercially to distinguish between typed and handwritten text by the 1970s, today the applications for computer vision have grown exponentially. By 2022, the computer vision and hardware market is expected to reach $48.6 billion.
How Does Computer Vision Work?
One of the major open questions in both Neuroscience and Machine Learning is: How exactly do our brains work, and how can we approximate that with our own algorithms? The reality is that there are very few working and comprehensive theories of brain computation; so despite the fact that Neural Nets are supposed to “mimic the way the brain works,” nobody is quite sure if that’s actually true.
The same paradox holds true for computer vision — since we’re not decided on how the brain and eyes process images, it’s difficult to say how well the algorithms used in production approximate our own internal mental processes.
On a certain level Computer vision is all about pattern recognition. So one way to train a computer how to understand visual data is to feed it images, lots of images thousands, millions if possible that have been labeled, and then subject those to various software techniques, or algorithms, that allows the computer to hunt down patterns in all the elements that relate to those labels.
So, for example, if you feed a computer a million images of cats, it will subject them all to algorithms that let them analyze the colors in the photo, the shapes, the distances between the shapes, where objects border each other, and so on, so that it identifies a profile of what “cat” means. When it’s finished, the computer will (in theory) be able to use its experience if fed other unlabeled images to find the ones that are of the cat.
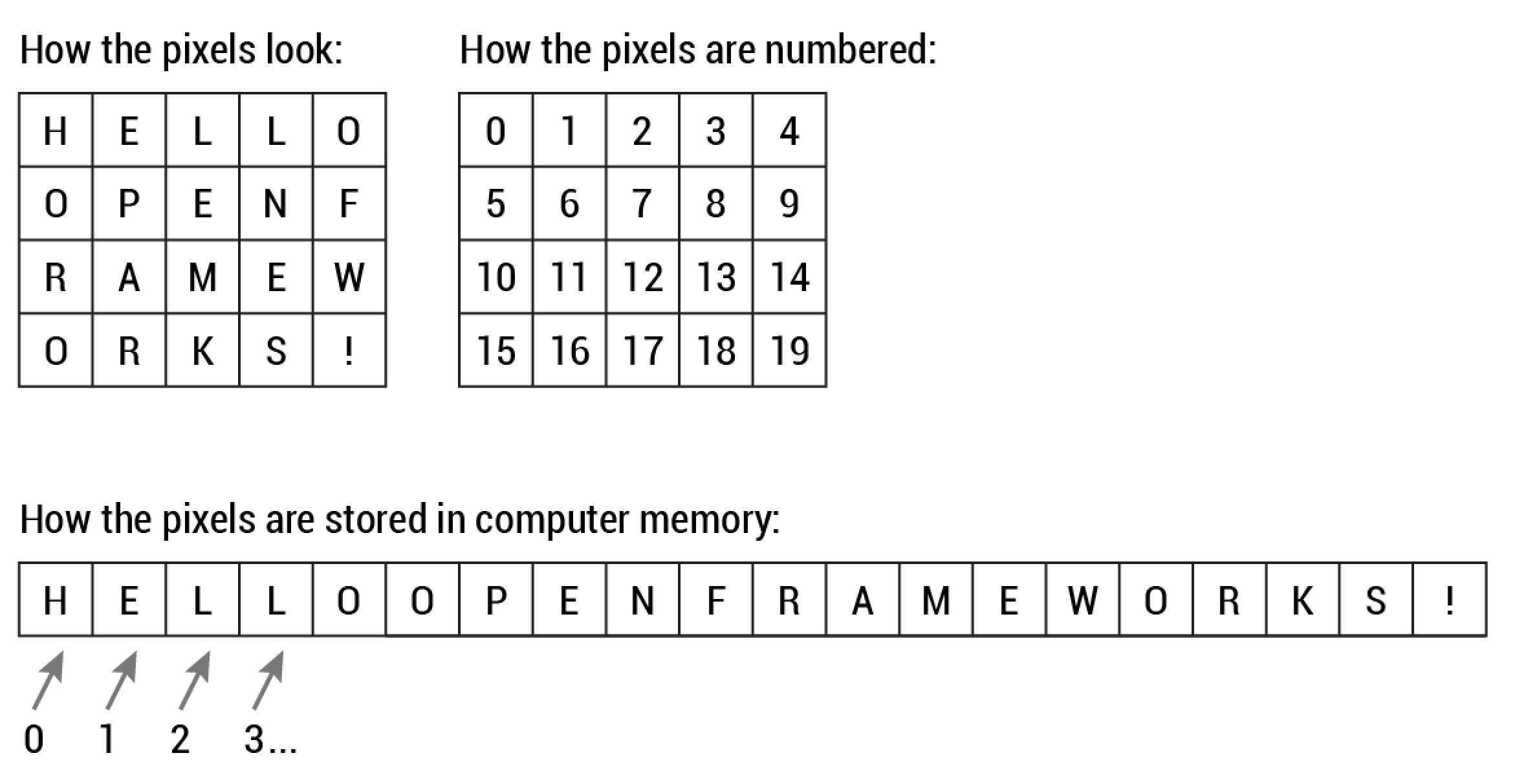
Let’s leave our fluffy cat friends for a moment on the side and let’s get more technical. Below is a simple illustration of the grayscale image buffer which stores our image of Abraham Lincoln. Each pixel’s brightness is represented by a single 8-bit number, whose range is from 0 (black) to 255 (white):
 |
| Pixel data diagram. At left, our image of Lincoln; at center, the pixels labeled with numbers from 0–255, representing their brightness; and at right, these numbers by themselves. In point of fact, pixel values are almost universally stored, at the hardware level, in a one-dimensional array. For example, the data from the image above is stored in a manner similar to this long list of unsigned chars: |
{157, 153, 174, 168, 150, 152, 129, 151, 172, 161, 155, 156,
155, 182, 163, 74, 75, 62, 33, 17, 110, 210, 180, 154,
180, 180, 50, 14, 34, 6, 10, 33, 48, 106, 159, 181,
206, 109, 5, 124, 131, 111, 120, 204, 166, 15, 56, 180,
194, 68, 137, 251, 237, 239, 239, 228, 227, 87, 71, 201,
172, 105, 207, 233, 233, 214, 220, 239, 228, 98, 74, 206,
188, 88, 179, 209, 185, 215, 211, 158, 139, 75, 20, 169,
189, 97, 165, 84, 10, 168, 134, 11, 31, 62, 22, 148,
199, 168, 191, 193, 158, 227, 178, 143, 182, 106, 36, 190,
205, 174, 155, 252, 236, 231, 149, 178, 228, 43, 95, 234,
190, 216, 116, 149, 236, 187, 86, 150, 79, 38, 218, 241,
190, 224, 147, 108, 227, 210, 127, 102, 36, 101, 255, 224,
190, 214, 173, 66, 103, 143, 96, 50, 2, 109, 249, 215,
187, 196, 235, 75, 1, 81, 47, 0, 6, 217, 255, 211,
183, 202, 237, 145, 0, 0, 12, 108, 200, 138, 243, 236,
195, 206, 123, 207, 177, 121, 123, 200, 175, 13, 96, 218};This way of storing image data may run counter to your expectations, since the data certainly appears to be two-dimensional when it is displayed. Yet, this is the case, since computer memory consists simply of an ever-increasing linear list of address spaces.
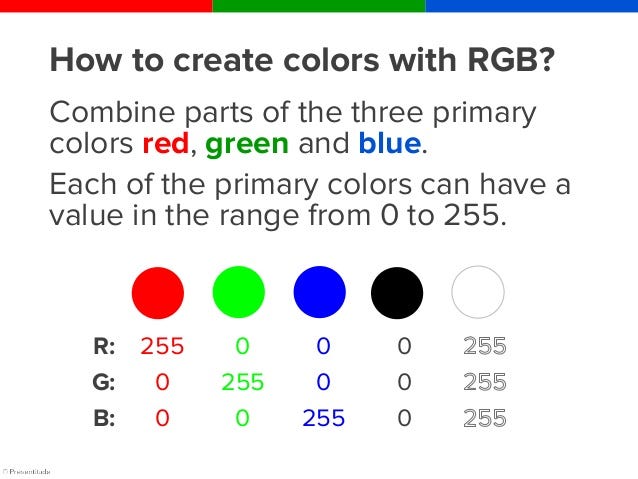
Let’s go back to the first picture again and imagine adding a colored one. Now things start to get more complicated. Computers usually read color as a series of 3 values — red, green, and blue (RGB) — on that same 0–255 scale. Now, each pixel actually has 3 values for the computer to store in addition to its position. If we were to colorize President Lincoln, that would lead to 12 x 16 x 3 values, or 576 numbers.
That’s a lot of memory to require for one image, and a lot of pixels for an algorithm to iterate over. But to train a model with meaningful accuracy especially when you’re talking about Deep Learning you’d usually need tens of thousands of images, and the more the merrier.
The Evolution Of Computer Vision
Before the advent of deep learning, the tasks that computer vision could perform were very limited and required a lot of manual coding and effort by developers and human operators. For instance, if you wanted to perform facial recognition, you would have to perform the following steps:
- Create a database: You had to capture individual images of all the subjects you wanted to track in a specific format.
- Annotate images: Then for every individual image, you would have to enter several key data points, such as distance between the eyes, the width of nose bridge, distance between upper-lip and nose, and dozens of other measurements that define the unique characteristics of each person.
- Capture new images: Next, you would have to capture new images, whether from photographs or video content. And then you had to go through the measurement process again, marking the key points on the image. You also had to factor in the angle the image was taken.
After all this manual work, the application would finally be able to compare the measurements in the new image with the ones stored in its database and tell you whether it corresponded with any of the profiles it was tracking. In fact, there was very little automation involved and most of the work was being done manually. And the error margin was still large.
Machine learning provided a different approach to solving computer vision problems. With machine learning, developers no longer needed to manually code every single rule into their vision applications. Instead they programmed “features,” smaller applications that could detect specific patterns in images. They then used a statistical learning algorithm such as linear regression, logistic regression, decision trees or support vector machines (SVM) to detect patterns and classify images and detect objects in them.
Machine learning helped solve many problems that were historically challenging for classical software development tools and approaches. For instance, years ago, machine learning engineers were able to create a software that could predict breast cancer survival windows better than human experts. However building the features of the software required the efforts of dozens of engineers and breast cancer experts and took a lot of time develop.
Deep learning provided a fundamentally different approach to doing machine learning. Deep learning relies on neural networks, a general-purpose function that can solve any problem representable through examples. When you provide a neural network with many labeled examples of a specific kind of data, it’ll be able to extract common patterns between those examples and transform it into a mathematical equation that will help classify future pieces of information.
For instance, creating a facial recognition application with deep learning only requires you to develop or choose a preconstructed algorithm and train it with examples of the faces of the people it must detect. Given enough examples (lots of examples), the neural network will be able to detect faces without further instructions on features or measurements.
Deep learning is a very effective method to do computer vision. In most cases, creating a good deep learning algorithm comes down to gathering a large amount of labeled training data and tuning the parameters such as the type and number of layers of neural networks and training epochs. Compared to previous types of machine learning, deep learning is both easier and faster to develop and deploy.
Most of current computer vision applications such as cancer detection, self-driving cars and facial recognition make use of deep learning. Deep learning and deep neural networks have moved from the conceptual realm into practical applications thanks to availability and advances in hardware and cloud computing resources.
How Long Does It Take To Decipher An Image
In short not much. That’s the key to why computer vision is so thrilling: Whereas in the past even supercomputers might take days or weeks or even months to chug through all the calculations required, today’s ultra-fast chips and related hardware, along with the a speedy, reliable internet and cloud networks, make the process lightning fast. Once crucial factor has been the willingness of many of the big companies doing AI research to share their work Facebook, Google, IBM, and Microsoft, notably by open sourcing some of their machine learning work.
This allows others to build on their work rather than starting from scratch. As a result, the AI industry is cooking along, and experiments that not long ago took weeks to run might take 15 minutes today. And for many real-world applications of computer vision, this process all happens continuously in microseconds, so that a computer today is able to be what scientists call “situationally aware.”
Applications Of Computer Vision
Computer vision is one of the areas in Machine Learning where core concepts are already being integrated into major products that we use every day.
CV In Self-Driving Cars
But it’s not just tech companies that are leverage Machine Learning for image applications. Computer vision enables self-driving cars to make sense of their surroundings. Cameras capture video from different angles around the car and feed it to computer vision software, which then processes the images in real-time to find the extremities of roads, read traffic signs, detect other cars, objects and pedestrians. The self-driving car can then steer its way on streets and highways, avoid hitting obstacles, and (hopefully) safely drive its passengers to their destination.
CV In Facial Recognition
Computer vision also plays an important role in facial recognition applications, the technology that enables computers to match images of people’s faces to their identities. Computer vision algorithms detect facial features in images and compare them with databases of face profiles. Consumer devices use facial recognition to authenticate the identities of their owners. Social media apps use facial recognition to detect and tag users. Law enforcement agencies also rely on facial recognition technology to identify criminals in video feeds.
CV In Augmented Reality & Mixed Reality
Computer vision also plays an important role in augmented and mixed reality, the technology that enables computing devices such as smartphones, tablets and smart glasses to overlay and embed virtual objects on real world imagery. Using computer vision, AR gear detect objects in real world in order to determine the locations on a device’s display to place a virtual object. For instance, computer vision algorithms can help AR applications detect planes such as tabletops, walls and floors, a very important part of establishing depth and dimensions and placing virtual objects in physical world.
CV In Healthcare
Computer vision has also been an important part of advances in health-tech. Computer vision algorithms can help automate tasks such as detecting cancerous moles in skin images or finding symptoms in x-ray and MRI scans.
Challenges of Computer Vision
Helping computers to see turns out to be very hard. Inventing a machine that sees like we do is a deceptively difficult task, not just because it’s hard to make computers do it, but because we’re not entirely sure how human vision works in the first place.
Studying biological vision requires an understanding of the perception organs like the eyes, as well as the interpretation of the perception within the brain. Much progress has been made, both in charting the process and in terms of discovering the tricks and shortcuts used by the system, although like any study that involves the brain, there is a long way to go.
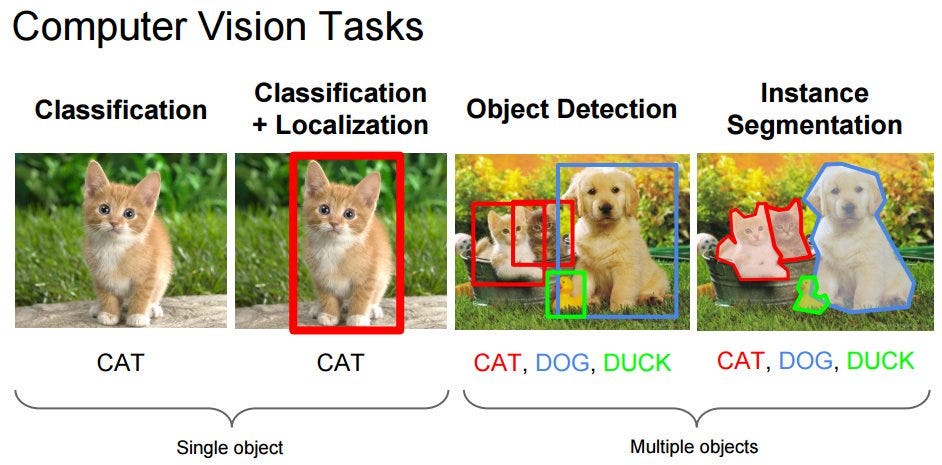
Many popular computer vision applications involve trying to recognize things in photographs; for example:
- Object Classification: What broad category of object is in this photograph?
- Object Identification: Which type of a given object is in this photograph?
- Object Verification: Is the object in the photograph?
- Object Detection: Where are the objects in the photograph?
- Object Landmark Detection: What are the key points for the object in the photograph?
- Object Segmentation: What pixels belong to the object in the image?
- Object Recognition: What objects are in this photograph and where are they?
Outside of just recognition, other methods of analysis include:
- Video motion analysis uses computer vision to estimate the velocity of objects in a video, or the camera itself.
- In image segmentation, algorithms partition images into multiple sets of views.
- Scene reconstruction creates a 3D model of a scene inputted through images or video.
- In image restoration, noise such as blurring is removed from photos using Machine Learning based filters.
Any other application that involves understanding pixels through software can safely be labeled as computer vision.
Conclusion
Despite the recent progress, which has been impressive, we’re still not even close to solving computer vision. However, there are already multiple healthcare institutions and enterprises that have found ways to apply CV systems, powered by CNNs, to real-world problems. And this trend is not likely to stop anytime soon.


